Graduate projects

Conference Navigator 2013 |
[Side project] Most conference proceedings are large, unorganized blocks of text. Our goal is to make it easier to find papers relevant to your area of interest in a shorter amount of time. We use language models that cluster topics based on the similarity of each text and visualize the connections using interactive designs. Avaiable navigators: ICCV 2013, CVPR 2013.
|

Automated Workflow and Activity Recognition in an Intensive Care Unit (2012-2013) |
Intensive Care Units are hectic. During a patient's stay there are many hundreds of small tasks that need to be completed, often in a specific sequence, and coordinated in time by a team of up to a hundred staff members. These include actions like giving medication, emptying chest tubes, and documenting vital signs. We are working on developing activity recognition techniques for logging the patient-staff interactions to improve workflow and potentially increase patient safety. An Xbox Kinect and other sensors are being used to monitor the ICU over extended periods of time and will be critical in automatically identifying the tasks at hand.
|

Graphical Interface for Robotic Laparoscopic Ultrasound Surgery (Winter 2012) |
Current methods for laparoscopic ultrasound surgery are hindered by lack of ultrasound probe mobility, long procedure times, and inconvenient methods for displaying preoperative images. I developed a graphical interface for use with the DaVinci medical robot which makes it easier for surgerons to go back to previously detected lesions and easily reference prior screencaps and relevent imagery.
|

Near Real-time Pointcloud Smoothing for 3D Imaging Systems (Fall 2011) |
[Parallel Programming Class Project] In this project a GPU-based implementation of Moving Least Squares is presented for smoothing 3D pointclouds. We used an Xbox Kinect to generate spatial data and coded our algorithm using CUDA with the Thrust library. Our implementation uses an organized set of points and can be computed at ~7 Hz on a Nvidia Quadro FX 4800. While perhaps not directly comparable, it has a speedup of between 30-60x when compared to the non-organized serial solution currently in PCL. Additional ways to harness greater performance are also discussed.
|
Undergraduate projects
Computer Vision
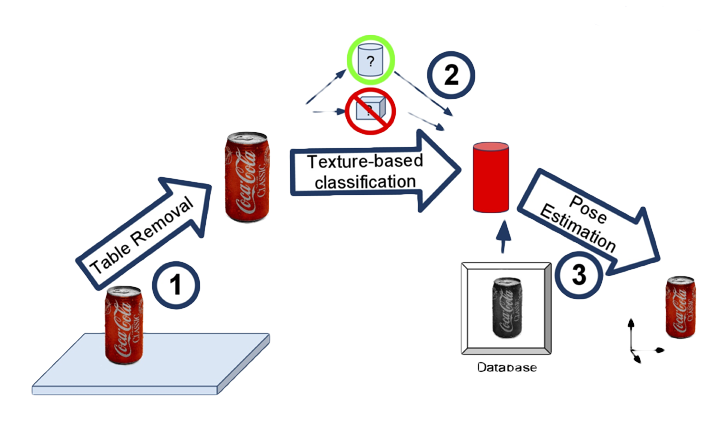
Solutions in Perception Challenge (Spring 2011) |
We developed an entry into the Solutions in Perceptions Challenge as part of the 2011 International Conference on Robotics and Automation (ICRA). The goal of this competition is to determine the pose and classification of household objects within a series of increasingly complex scenes using an XBox Kinect. Contributions are made in the training and detection phases of our system. We ultimately found the best results using a table-removal-based object detection system, texture-based classification using the Scale-Invariant Feature Transform (SIFT) and pose estimation using Multi-Resolution Occupied Lists (MROL). Preliminary results show high classification accuracy and adequate pose estimation on the training datasets.
|

Efficient Hierarchical Markov Random Fields for Object Detection on a Mobile Robot (2010-2011) |
Abstract: Object detection and classifcation using video is necessary for intelligent planning and navigation on a mobile robot. However, current methods can be too slow or not sufficient for distinguishing multiple classes. Techniques that rely on binary (foreground/background) labels incorrectly identify areas with multiple overlapping objects as single segment. We propose two Hierarchical Markov Random Field models in efforts to distinguish connected objects using tiered, binary label sets. Near-realtime performance has been achieved using efficient optimization methods which runs up to 11 frames per second on a dual core 2.2 Ghz processor. Evaluation of both models is done using footage taken from a robot obstacle course at the 2010 Intelligent Ground Vehicle Competition.
|

Analysis of Error-resistant Classification Models (Fall 2010) |
[Computer Vision Class Project] Abstract: The K-Nearest Neighbors classifier is evaluated on data sets which are sampled from separate Gaussian distributions. Experiments are conducted to determine the accuracy of classification on samples (1) using various numbers of neighbors (k=1...9), (2) from distributions with varying means, and (3) that are injected with false initial class labels. Accuracy is found to rise moderately with an increase in the number of neighbors in most cases. When distributions are close in proximity the effect of injecting a large number of "false" labelled data points has a relatively small effect.
|

Image-based, Geometric Sensing in Unstructured Environments (Summer 2010) |
Structured Light and Stereo Vision techniques were investigated for use in rocky, unstructured environments. Mine accidents around the world cause thousands of deaths every year. For safety reasons it is often not feasible for rescue crews to travel deep into the mine. Additionally, current maps in many of these facilities are inaccurate or incomplete. Algorithms were implemented to generate 3D models using multi-camera and camera-projectors techniques with evaluation at the Bruceton Research Mine and Walkers Mill Cave in Pennsylvania.
|
Haptic Design and Simulation

Low Cost Five DoF Haptic Device (Spring 2010) |
I developed a novel, low-cost 5-degree of freedom haptic device using two Novint Falcon's and wrote a corresponding rigid body haptic renderer. [Presentation]
|
Tutorials for Creating Haptic Simulations using H3D (Spring 2010) |
The goal of these tutorials is to get a user started with H3D, an open source haptics platform. An introduction to implementing virtual fixtures with X3D and more in depth applications using Python are provided. The creation of new force effects using C++ for enhanced manipulation is also presented. The target demographic is anyone interested in haptics with some programming experience. [Tutorials]
|

Haptic Rendering and Visualization (Fall 2009) |
This work explored a variety of haptic rendering methods using a Novint Falcon and Phantom Omni. I have developed a two-dimensional haptic rendering method within Simulink and evaluated an open source haptics platform, H3D, to learn more about algorithms and experiment using custom 3D models and force events.
|

Haptic Rendering of Virtual Mechanisms (Summer 2009) |
Mechanism development is often an important element of mechanical design used to constrain moving parts in an assembly. These articulated systems are unintuitive to new designers and are not ease to demonstrate on paper. This work enhances previous visual-based methods of teaching mechanism theory by adding a haptic component that allows users to feel workspace and manipulability characteristics. This document details the implementation done using Matlab/Simulink and additionally includes a tutorial on SimMechanics.
|
Robotics

Intelligent Ground Vehicle Competition (2009-2011) |
The goal of this international competition is to design a vehicle than can autonomously navigate a set of obstacles courses by avoiding obstacles, staying between lane markers, and driving to GPS waypoints. My work has included localization, motion planning, motor control using PID, and computer vision.
|

Design and virtual implementation of a 3-PPR Mechanism (Fall 2009) |
[Math Methods in Robotics Class Project] This class focuses on mechanism design and analysis with emphasis on the underlying math. The final project develops and implements the kinematics of a parallel 3PPR and a serial PPRR mechanism within Matlab. A group presentation on the state of the art in Personal Robotics was also created.
|
Teleoperation and Interaction With a Mobile Robot (Fall 2008) |
Teleoperation of a mobile robot is difficult because the user often does not have an intuitive method of controlling the vehicle. Multiple modalities of user interaction are explored using a framework developed in Matlab. Gestural interfaces, a graphical user interface, and internet-based teleoperation are evaluated in order to examine ease of use and effectiveness.
|

Battlebots (2007, 2009) |
We won the intra-university battlebot contest which resulted in placing 1st out of 16 teams in the 2009 Engineers Week competition.
|
Other Projects

Engineering Design Philosophy (Fall 2010) |
[Senior Design Seminar Portfolio] In this piece I elaborate on various aspects of design and discuss how the ideas and projects as part of my senior design seminar have impacted my thought process. I link these together with my past work and future goals. This is put in place as a "portfolio" in response to MAE451 at Buffalo.
|

CAD Design of a Novel Car Beverage Holder for Children. (Summer 2009) |
[CAD Course Class Project] This class focuses on product design using Pro/Engineer. For the final project students are given a basic problem and are expected to submit a proposal for a product designed with CAD software. A novel car beverage holder for children is presented.
|

Compact Rio/Simulink Video Tutorials (Summer 2009) |
Getting the National Instruments Compact Rio to work with Simulink can be a bit tricky. Video tutorials demonstrate how to work between Simulink and LabVIEW and how to interface the cRio with LabVIEW. [Tutorials]
|

SimMechanics Tutorial (Spring 2009) |
SimMechanics is a Simulink toolbox that allows for creation of rigid bodies for dynamic simulation. It is possible to create a collection of rigid bodies and joints with actuators and sensors without having to develop the kinematic equations. In this tutorial I demonstrate how to develop a fourbar mechanism. [Tutorial]
|